
Page 69 - 2018自動化工業總覽
P. 69
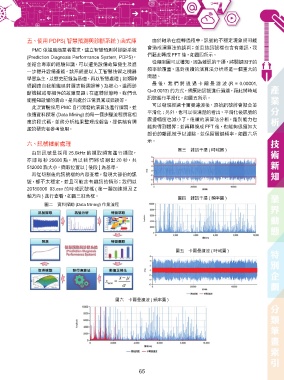
五丶、使用 PDPS( 智慧預測與診斷系統 ) 函式庫 由於軸承在旋轉過程中,訊號的不穩定現象將可能
會造成演算法的誤判;並且該訊號檔也含有雜訊,我
PMC 依據廠商業者需求,建立智慧預測與診斷系統
們藉此轉成 FFT 後,如圖四所示。
(Prediction Diagnosis Performance System, PDPS),
從頻率圖可以獲知,因為雜訊的干擾,將關鍵因子的
並結合專家的經驗知識,可以避免設備故障發生及進
頻率給覆蓋,這對後續的演算法分析將是一個重大的
一步提升設備產能。該系統是以人工智慧技術之機器
問題。
學習為主,以歷史記錄為基礎,再以智慧處理 ( 如類神
最 後, 我 們 將 透 過 卡 爾 曼 濾 波 (R = 0.00001,
經網路丶自我組織映射丶羅吉斯迴歸等 ) 為核心,進而診
Q=0.0013) 的方式,將原始訊號進行過濾,藉此將時域
斷機械或零組件的故障問題;在運轉狀態時,我們也
訊號進行平滑化,如圖五所示。
能獲知設備的壽命,是否處於正常丶異常或錯誤等。
可以發現經過卡爾曼濾波後,原始訊號將會擬合並
此次實驗採用 PMC 自行開發的演算法進行撰寫,並
平滑化;另外,也可以很清楚的看出,平滑化後訊號的
依循資料探堪 (Data Mining) 的每一個步驟流程撰寫相
震盪幅度也減小了,後續的演算法分析,鑑別能力也
應的程式碼,並將分析結果整理成報告,提供給有興
能夠得到提昇;並再轉換成 FFT 後,也能夠很獲知大
趣的研究者參考使用。
部份的雜訊被予以濾除,並保留關鍵頻率,如圖六所
示。
六丶、訊號檔前處理
圖三 雜訊干擾 ( 時域圖 )
由於訊號是採用 25.6kHz 的擷取頻寬進行擷取,
亦 即每秒 25600 點,所 以 我 們 將 切割出 20 秒,共
512000 點大小。擷取位置以 [ 後段 ] 為基準。
再從切割後的訊號檔的內容查看,發現大部份的訊
號,都不太穩定,並且可能含有雜訊的情形;我們以
20180306_03.csv 的時域訊號檔 ( 第一顆加速規及 Z
軸方向 ) 進行查看,如圖三紅色框。
圖四 雜訊干擾 ( 頻率圖 )
圖二 資料探勘 (Data Mining) 作業流程
圖五 卡爾曼濾波 ( 時域圖 )
圖六 卡爾曼濾波 ( 頻率圖 )
65