
Page 72 - 2018自動化工業總覽
P. 72
十一丶、效能評估 ( 區域鑑別 ) 十三、丶結論
透過羅吉斯迴歸演算法後,可以發現有三個區域, 提昇軸承可靠度,試圖降低故障頻率與縮短維修時
即 59% 以上丶 30%~58% 之間及 29% 以下;接下來我 間;蒐集足夠的歷史資料 ( 軸承運作資訊等 ),才足以
們會再透過自我組織映射圖演算法 (Self-Organizing 建立有效的預測模型,並從而評估軸承元件的概況。
Map, SOM) 驗證這三個區域。 智慧預測與診斷系統 (PDPS) 導入後,生產線管理者
SOM 屬於非監督式群聚演算法,我們將特徵選取後 及維修工程師將可即時獲知軸承目前健康情形,以
的 20 個特徵屬性放到該演算法內,設定參數如下: 及可縮短軸承更換時間,並提早因應停機措施,達成
1. 拓撲圖大小:5*5 Zero-downtime 的目標。
2. 鄰近半徑:6
3. 學習速率:0.05 參考資料:http://pdc.pmc.org.tw
4. 疊代次數:500
執行 SOM 演算法完成後,我們將已知的資料標籤
圖十一 我組織映射圖演算法 (SOM)
代入,可以得到如圖十一的三個區域。再從該演算法
輔助評估及證實,羅吉斯迴歸的演算法產生的模型,
確實可以被使用。另外,我們也可以透過 SOM 演算法,
獲知目前軸承的損耗軌跡圖;在良好區內反覆移動,直
到進入警告區時,此時必須通知維修工程師,進行備
料及安排停機時間,防止軸承進入失效區。
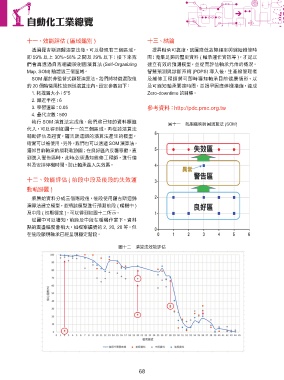
十二丶、效能評估 ( 前段丶中段及後段的失效運
動軌跡圖 )
將原始資料分成三個階段後,後段使用羅吉斯迴歸
演算法建立模型,並將該模型進行預測前段 ( 暖機中 )
及中段 ( 初期穩定 ),可以得到如圖十二所示。
從圖中可以獲知,前段及中段在暖機作業下,資料
點的震盪幅度會稍大,如檔案編號的 2, 20, 28 等,但
在後段顯現軸承已經呈現穩定階段。
圖十二 演算法效能評估
68